本站6月4日消息,外骨骼機器人是下肢偏癱患者康復的有效方案,但需實現輕量化、柔順性設計與高效協同康復輔助才能走進臨床。
中國科學院沈陽自動化研究所研發的“剛柔耦合”下肢多關節康復外骨骼機器人有望解決這一問題。
下肢偏癱康復外骨骼機器人雖能為步態訓練提供輔助,但面臨技術瓶頸,如驅動方式“剛柔兩難”,構型與康復需求匹配性低,且患者有“一體兩面”的特殊需求,與傳統控制策略矛盾。
研究團隊基于自研串聯彈性驅動器,提出剛柔耦合柔順驅動關節,具備多模態剛度響應特點,構建了輕量化、高性能驅動方案,單模塊重0.99kg,功率密度達212W/kg。
他們還結合康復需求,實現雙側“髖-膝-踝”多關節完整鏈路柔順驅動,構建系統級設計方案。
圍繞患者雙側差異化需求,團隊提出按需輔助的交互控制方法,頂層動態規劃最優康復運動,中層實現人機同步,底層為患側針對性康復、健側柔順輔助。
該機器人經臨床驗證,有效實現運動學重塑、提升步態自然性與對稱性等關鍵目標,為偏癱康復提供了新思路。
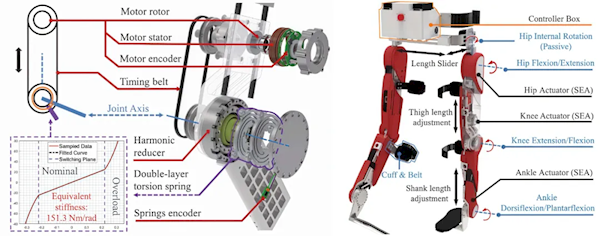
基于柔順關節的雙側髖-膝-踝全柔順驅動康復外骨骼系統
鄭重聲明:本文版權歸原作者所有,轉載文章僅為傳播更多信息之目的,如作者信息標記有誤,請第一時間聯系我們修改或刪除,多謝。



